探針臺(tái)
Probe Stations


波導(dǎo)耦合系統(tǒng)是指利用波導(dǎo)結(jié)構(gòu)實(shí)現(xiàn)光信號(hào)耦合和傳輸?shù)南到y(tǒng)。它能夠?qū)⒐庑盘?hào)從一個(gè)介質(zhì)或波導(dǎo)高效地傳輸?shù)搅硪粋€(gè)介質(zhì)或波導(dǎo),同時(shí)保持光信號(hào)的完整性和穩(wěn)定性。該系統(tǒng)在光通信、光信息處理、集成光學(xué)等領(lǐng)域具有廣泛應(yīng)用。
波導(dǎo)耦合系統(tǒng)可以根據(jù)耦合方式、波導(dǎo)類型以及應(yīng)用場(chǎng)景等因素進(jìn)行分類。常見的耦合方式包括直接耦合和間接耦合,而波導(dǎo)類型則包括平面波導(dǎo)、光纖波導(dǎo)等。在結(jié)構(gòu)上,波導(dǎo)耦合系統(tǒng)通常由輸入波導(dǎo)、耦合區(qū)域和輸出波導(dǎo)三部分組成。輸入波導(dǎo)用于接收并傳輸光信號(hào),耦合區(qū)域則實(shí)現(xiàn)光信號(hào)在兩個(gè)波導(dǎo)之間的傳輸和耦合,輸出波導(dǎo)則用于接收并輸出耦合后的光信號(hào)。輸入輸出端口用于連接光源和探測(cè)器等外部設(shè)備;控制系統(tǒng)則用于對(duì)系統(tǒng)的運(yùn)行進(jìn)行監(jiān)控和調(diào)節(jié)。
1、安裝芯片和光纖
2、光纖與芯片粗略對(duì)準(zhǔn)
3、耦合對(duì)準(zhǔn)
4、優(yōu)化和點(diǎn)膠
5、UV固化
6、下料
首先將光纖陣列與平面波導(dǎo)芯片裝配完成(夾持或真空吸附),一旦CHIP和光纖陣列FA被裝好,使用視覺系統(tǒng)將各組件調(diào)整到合適位置,然后進(jìn)行預(yù)裝配工藝。如圖1、圖2所示,輸入光纖陣列(輸出光纖陣列同理)需要與平面波導(dǎo)器件做精確的平行定位。使用垂直和平行相機(jī),所有位置僅用一次調(diào)整,就可實(shí)現(xiàn)平行定位的設(shè)置。夾具的精度將保證在以后的裝配中保持其定位關(guān)系。

圖1

圖2
組件裝夾完成后,通過(guò)校正(1)光纖耦合位移臺(tái)和顯微鏡的X、Y、Z方向的偏差來(lái)進(jìn)行光纖與CHIP芯片大致對(duì)準(zhǔn)。然后操作員通過(guò)圖像(水平投影+垂直投影)顯示出的各項(xiàng)偏差,然后手動(dòng)調(diào)整來(lái)補(bǔ)償偏差如圖3所示。

圖3
a. 當(dāng)三個(gè)器件完成初始定位,同時(shí)確認(rèn)其在Z軸方向的相對(duì)位置關(guān)系后,這時(shí)需要確認(rèn)輸入光纖陣列和波導(dǎo)器件之間光的耦合對(duì)準(zhǔn)。然后先將輸出端光纖移開,右側(cè)放置一個(gè)光功率計(jì)。通過(guò)分析輸入端光源釋放功率及CHIP芯片本身的光損耗,不斷微調(diào)輸入端的位置來(lái)找到去除CHIP芯片光損壞的最接近值,則判斷輸入端基本耦合對(duì)準(zhǔn)完成。
b. 將光功率計(jì)移開,輸入端不動(dòng),微調(diào)輸出端XYZ,輸出端光纖接上光功率計(jì)。然后反復(fù)微調(diào)整輸出端,使得光功率不斷接近去除CHIP芯片的光損耗最佳值。直至調(diào)節(jié)任意一軸光功率都會(huì)變差為止,此時(shí)系統(tǒng)處于光功率最佳位置(相對(duì)接近真實(shí)值),且輸入與輸出端與CHIP芯片基本耦合完成入如圖4所示。
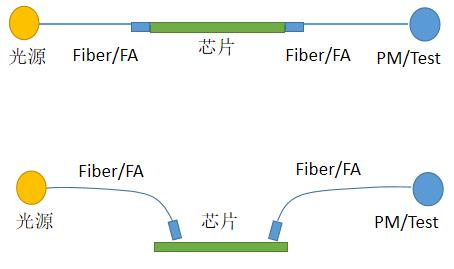
圖4
在此過(guò)程中,可以用輸出光纖陣列第一個(gè)通道,延X軸的方向?qū)Σ▽?dǎo)各通道進(jìn)行掃描,以測(cè)量其各通道的光功率如圖5所示。在整個(gè)器件完成光耦合效率優(yōu)化,并對(duì)輸入及輸出光纖陣列進(jìn)行定位后,就可以使用自動(dòng)點(diǎn)膠系統(tǒng)將各個(gè)器件進(jìn)行粘接如圖6所示。

圖5

圖6
等待固化
松開夾具,取下物料。



專屬微信 請(qǐng)掃描二維碼添加












